动态规划(DP)是一种算法范式,通过子问题分解来求解原问题,并存储子问题的解,避免重复计算,提高效率。
子问题分解是一种通用的算法思路,在分治、动态规划、回溯中的侧重点不同。
- 分治算法递归地将原问题划分为多个相互独立的子问题,直至最小子问题,并在回溯中合并子问题的解,最终得到原问题的解。
- 动态规划也对问题进行递归分解,但与分治算法的主要区别是,动态规划中的子问题是相互依赖的,在分解过程中会出现许多重叠子问题。
- 回溯算法在尝试和回退中穷举所有可能的解,并通过剪枝避免不必要的搜索分支。原问题的解由一系列决策步骤构成,我们可以将每个决策步骤之前的子序列看作一个子问题。
例题:爬楼梯
-
楼梯 阶,每次可上 或 阶,问有多少种爬法。
-
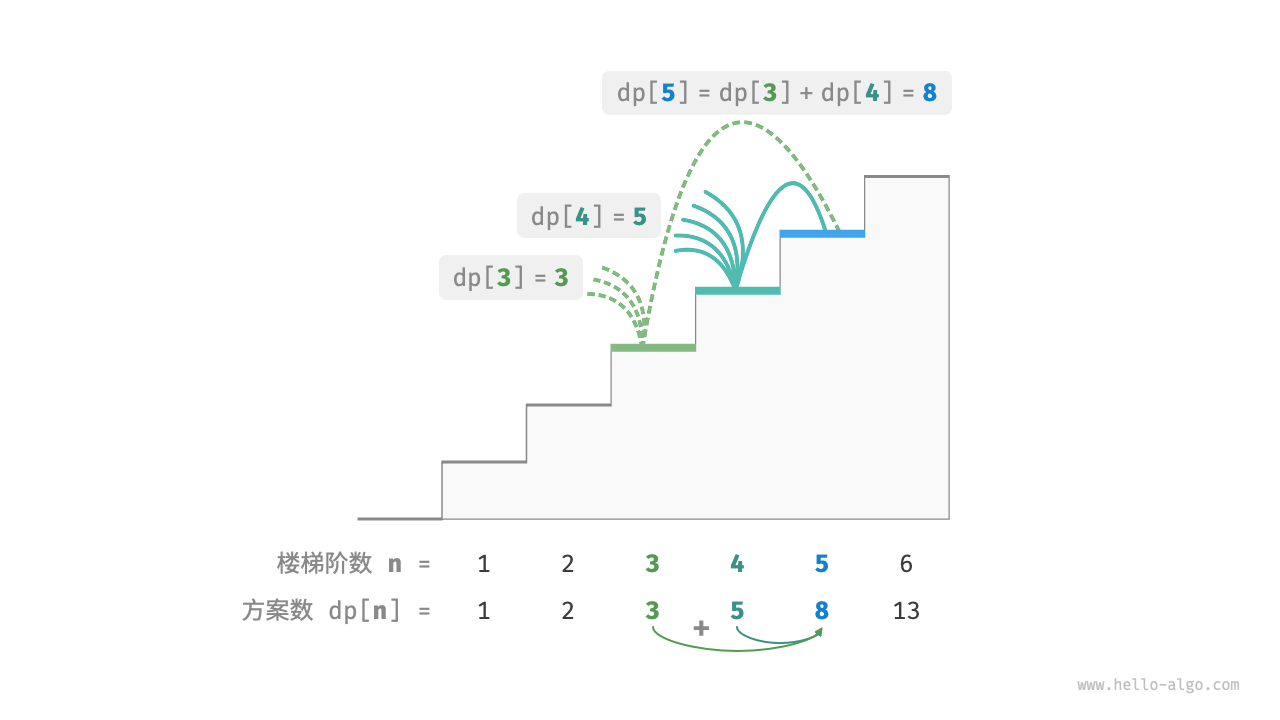
例如 时,共 种方案。
方法一:暴力搜索
-
思路:递归枚举所有可能路径。
-
缺点:存在大量 重叠子问题,复杂度 。
子问题的解法之和等于母问题(互相独立的组合数相加):
方法二:记忆化搜索
-
“自顶向下” → 记忆化搜索:我们从原问题(根节点)开始,递归地将较大子问题分解为较小子问题,直至解已知的最小子问题(叶节点)。之后,通过回溯逐层收集子问题的解,构建出原问题的解。
-
思路:在递归基础上,使用
mem数组记录已算出的子问题。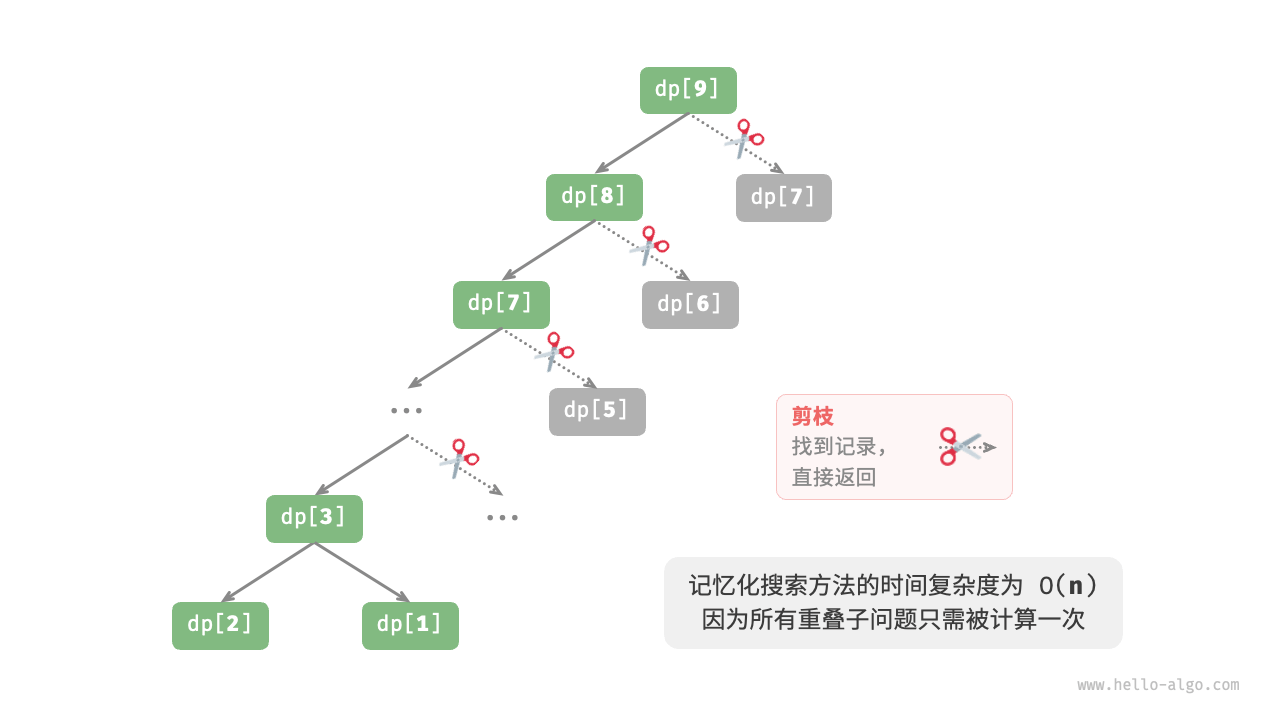
-
优点:避免重复计算,复杂度优化到 。
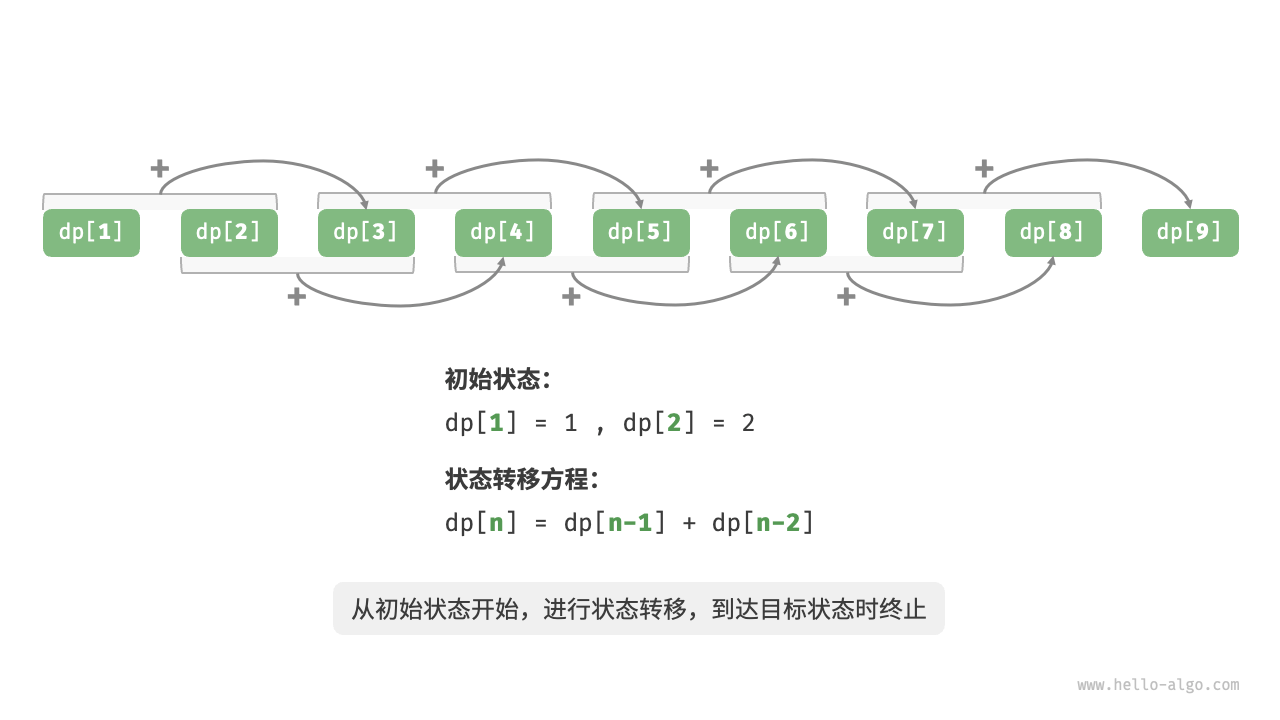
方法三:动态规划, DP
-
“自底向上” → 动态规划:从最小子问题的解开始,迭代地构建更大子问题的解,直至得到原问题的解。
-
由于动态规划不包含回溯过程,因此只需使用循环迭代实现,无须使用递归。在以下代码中,我们初始化一个数组
dp来存储子问题的解,它起到了与记忆化搜索中数组mem相同的记录作用 -
将数组
dp称为 dp 表, 表示状态 对应子问题的最优解。 -
将最小子问题对应的状态(第 阶和第 阶楼梯)称为初始状态。
-
将递推公式 称为状态转移方程。
在动态规划问题中,当前状态往往仅与前面有限个状态有关,这时我们可以只保留必要的状态,通过“降维”来节省内存空间。这种空间优化技巧被称为“滚动变量”或“滚动数组”。
DP 要能用,核心是三个关键词:
-
重叠子问题:避免重复算。
-
最优子结构:大问题的最优解由小问题的最优解构成。
-
无后效性:未来状态只依赖现在,不依赖过去路径。
实用判断法:
-
先看能不能用回溯(穷举) 解决:符合“决策树模型”(一系列决策构成解)。
-
如果还带有“最大/最小/最优”的目标 → 更可能是 DP。
-
如果问题状态能抽象成数组/矩阵/树,并且相邻状态有递推关系 → DP 适合。