SFM通过分析一系列从不同、未知视角拍摄的二维(2D)照片,来同时地重建一个场景或物体的三维(3D)结构,并估算出拍摄每张照片时的相机位置和朝向,即输入照片,输出3D点云模型和相机路径。
两大类型
目前主流的 SfM(Structure from Motion,运动结构恢复) 方法主要分为两类:
- 全局式 SfM(Global SfM)
- 增量式 SfM(Incremental SfM)
全局式 SfM
- 基本思路
一次性求解所有相机的位姿,然后通过三角化获得场景点。 - 位姿估计分两步:
- 全局旋转估计
- 在已知旋转的基础上,全局平移估计
- 关键问题
- 第二步依赖第一步,因此 全局旋转估计的精度 决定了最终结果质量。
- 优缺点
- 优点:只需在最后进行一次 Bundle Adjustment (BA),效率高。
- 缺点:鲁棒性差,容易被 outlier 干扰导致重建失败。
增量式 SfM
- 基本思路
一边进行 三角化 (Triangulation) 与 PnP (Perspective-n-Points),一边执行局部 BA 优化。 - 优缺点
- 优点:鲁棒性高,对 outlier 不敏感。
- 缺点:效率较低,每加入一张图像都要 BA;误差会累积,可能产生漂移。
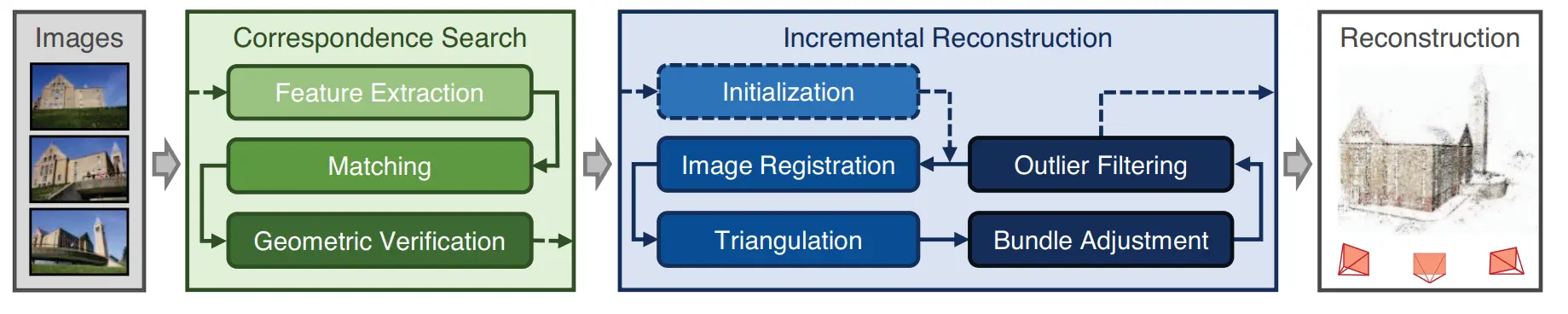
阶段1:对应关系搜索(Correspondence Search)=Feature Extraction+Matching+Geometric Verification
特征提取(Feature Extraction)
- 目标:在每张照片里找到一批“稳定且独特的小点”,方便后续跨照片对比。
- 每个局部特征包含两部分:
- 位置 (Location):点在图像中的像素坐标。
- 外观描述子 (Descriptor):这个点周围小区域的“指纹”(形状、纹理、颜色特征)。
- 关键要求:不变性 (Invariance)
- 同一个物理点,在不同光照或不同角度下,提取出的“指纹”要保持差不多。
- 这样才能在多张照片中把它认出来。
特征匹配(Matching)
-
目标:用特征点的“指纹(descriptor)”来比较不同照片里的点,找出那些可能属于同一个三维物理点的配对,形成 特征对应关系(feature correspondences)。
-
工作流程:
- 提取完特征后,把它们当作照片的“内容描述”。
- 找出哪些照片之间有场景重叠。
- 在重叠照片中,逐一对比特征指纹,相似度最高的就认为是匹配点。
-
朴素方法(Naïve Matching):
- 任意挑两张照片 A 和 B。
- 在 A 中选一个特征点,把它的指纹和 B 中所有特征点的指纹逐一比较。
- 找到最像的那个,认定为一对匹配。
- 对 A 中所有特征点重复上述步骤。
- 再换下一对照片,直到遍历整个照片集。
-
问题:
- 计算复杂度非常高:。
- 照片/特征点一多,几乎不可用。
-
实际改进:
- 核心思想:避免 穷举搜索(exhaustive search)。
- 使用更高效的算法(如索引、近似最近邻、图像检索等)来提升匹配速度。
-
输出结果:
- 并不是直接得到三维模型。
- 而是生成一份 “潜在重叠图像对”列表:
- 哪些图像可能有重叠;
- 其中包含多少潜在匹配点。
- “潜在”表示匹配只基于外观相似,里面可能有很多错误匹配(outliers)。
- 下一步必须通过 几何验证 来剔除这些错误。
几何验证(Geometric Verification)
-
目标:验证基于外观的匹配点,在几何上是否也合理。
- 特征匹配只看“长得像”,不能保证一定是同一个三维点。
- 几何验证利用投影几何来检验匹配对是否符合空间约束。
-
基本思路:
如果两张照片拍的是同一个刚性场景,那么 A 图中的点和 B 图中的对应点,必须满足一个统一的几何变换模型。
具体模型取决于相机运动方式和场景结构。 -
常见几何模型:
- 单应性 (Homography, H)
- 适用情况:
- 相机只旋转、不平移(如拍全景)。
- 场景是平面(如拍海报)。
- 适用情况:
- 对极几何 (Epipolar Geometry)
- 适用情况:相机有平移,场景是三维结构。
- 基础矩阵 (Fundamental Matrix, F):未标定相机。
- 本质矩阵 (Essential Matrix, E):已标定相机。
- 核心约束:A 图的点在 B 图中的对应点必须落在极线上。
- 三焦张量 (Trifocal Tensor)
- 三个相机视图的扩展模型,约束更复杂。
- 单应性 (Homography, H)
-
鲁棒估计方法:RANSAC
- 随机抽取最少点数(如估 F 矩阵需 8 对点)。
- 基于这些点计算一个假设模型(如 )。
- 用该模型测试所有匹配点,统计符合的点(内点 inliers)。
- 重复成百上千次,选出内点最多的模型作为最优结果。
- 其余不符合的点判定为外点(outliers),丢弃。
-
输出结果:场景图(Scene Graph)
- 节点:图像。
- 边:两张图有重叠,并附带可靠的匹配点数。
- 功能:为后续的增量式重建提供唯一输入和路线图。
阶段2:增量式重建(Incremental Reconstruction)=Initialization+Image Registration+Triangulation+Bundle Adjustment
初始化(Initialization)
-
目标:从场景图中挑选一对最合适的图像,利用它们之间的可靠匹配,创建整个三维重建的种子模型(seed model)。
- 种子模型是第一个、最小的、自洽的三维场景,包含两台相机的精确相对位姿和一个初始三维点云。
- 后续所有图像都将在这个基础上逐步“嫁接”进来。
-
关键性:
- 选择正确的初始配对至关重要,如果初始化很差,后续重建可能永远无法恢复。
- 重建的稳健性、精度和性能取决于种子位置。
-
为什么糟糕的初始化是灾难性的:
- 坐标系和尺度定义:初始化隐式决定了世界坐标系的原点、方向和尺度。若初始框架歪了,后面一切都会跟着歪。
- 误差传播:若两张照片离得太近,三角化结果会有大深度误差,该误差会在增量过程中不断放大,甚至 BA 也难以修正。
-
策略:
- 优先选择场景图中相机重叠多、冗余度高的区域作为初始化 → 更鲁棒、更准确。
- 如果从稀疏位置初始化,虽然运行时间短,但精度和稳定性会下降。
图像配准(Image Registration)
-
目标:为一张尚未加入模型的新图像,精确计算它在三维空间中的位置和朝向(相机位姿 Pose)。
- 方法:找到新图像中的 2D 特征点,与已有三维点云中的 3D 点建立对应关系(2D-3D correspondences),然后解 PnP(Perspective-n-Point)问题。
-
前提条件:必须已经有一个度量重建(metric reconstruction),即通过初始化得到的、带真实尺度(或一致尺度)的初始三维模型。
-
关键词解释:
- 2D-3D 对应关系
- 2D 点:新图像中的特征点像素坐标。
- 3D 点:在已有点云中对应的三维坐标。
- PnP 问题
- 类比:你在一个陌生地方,能看到几个地标,并且手里有一张地图,上面标着地标的三维位置。
- 通过测量这些地标在你视野中的方向和大小,你就能推算出自己当前的空间位置和朝向。
- 输入:至少 对 2D-3D 对应关系。
- 输出:相机的 6 自由度位姿 (6-DoF Pose) = 位置 + 朝向 。
- 2D-3D 对应关系
-
情况区分:
- 已标定相机:内参已知,只需求解 6 个位姿参数。
- 未标定相机:内参未知,需要同时求解位姿和内参(如焦距),问题更复杂,需更多对应点。
-
鲁棒估计:
- 2D-3D 对应关系里常有外点(错误匹配)。
- 解决办法:用 RANSAC + 最小姿态求解器,与几何验证的流程类似。
三角测量(Triangulation)
-
目标:利用至少两个已知位姿的相机,对同一个二维特征点的观测,计算该特征点在三维空间中的精确坐标。
-
前提条件:
- 新配准的图像必须能看到一部分已经存在的三维点(否则无法完成 PnP 定位)。
- 同时,新图像也能通过三角测量,帮助生成新的三维点,扩展场景覆盖范围。
-
核心机制:
- 生成新点:当一个新图像与至少另一张不同视角的图像共同覆盖某个新区域时,就能通过三角测量生成新的 3D 点。
- 冗余增强稳定性:
- 一个点只被两张照片看到时,三维位置可能不太精确。
- 如果后续更多照片(3、4、5 张)也看到这个点,就能利用更多观测来优化其坐标,使其更稳定、更准确。
- 为未来配准提供地标:
- 新生成的三维点会成为下一轮图像配准的“参照物”。
- 当新图像加入时,它通过匹配这些三维点来计算位姿。
-
重要性:
- 三角测量是 SfM 增量式循环的核心环节。
- 没有三角测量,三维点云不会增长,新图像也无法获得足够的 2D-3D 对应点用于 PnP 定位,最终会导致重建停滞。
捆绑调整(Bundle Adjustment, BA)
-
目标:对当前模型中所有已知参数(相机位姿、相机内参、三维点坐标)进行全局、非线性优化,以最小化整体的重投影误差。
-
背景:
- 图像配准(Image Registration)和三角测量(Triangulation)虽然是分开的步骤,但它们的结果强相关。
- 相机位姿的不确定性会传递到三角测量的三维点。
- 三角测量的不确定性也会反向影响相机位姿。
- 如果不进行进一步优化,SfM 容易因误差累积而快速漂移,进入不可恢复的状态。
- 图像配准(Image Registration)和三角测量(Triangulation)虽然是分开的步骤,但它们的结果强相关。
-
定义:
- BA = 联合非线性优化
- 同时调整:
- 相机参数
- 三维点参数
- 目标:最小化重投影误差(Reprojection Error)。
-
公式(重投影误差):
- :总误差。
- :图像 中观测到的特征点像素坐标。
- :根据相机参数 和三维点 投影得到的预测位置。
- :鲁棒函数,降低外点的影响。
-
解释:
- 预测位置:根据当前估计的三维点和相机参数,通过投影函数 计算出的像素位置。
- 现实位置:在特征提取阶段实际检测到的像素坐标,是唯一的观测“真值”。
- 误差:两者之间的差距。
-
特点:
- BA 把所有相机和三维点都放到一个大的优化问题中,一次性求全局最优。
- 从 3D 到 2D 的投影是非线性的(涉及除法),因此优化过程复杂,需要迭代算法。
- 常用优化器:Levenberg-Marquardt 算法(论文中提到)。
阶段3(可选):稠密后贴图(MVS → Texturing and Model Generation)
Dense Reconstruction(MVS)
- After sparse point clouds are obtained, further algorithms can interpolate and densify the reconstruction, producing a detailed 3D model.
Texturing and Model Generation
- The final step may involve generating a mesh and applying textures from the original images for realistic visualization.
常见开源实现
- Colmap:采用 增量式 SfM pipeline,鲁棒性强,应用广泛。
- OpenMVG:同时实现了 增量式 和 全局式 两种 pipeline,供用户选择。
误差来源
-
特征提取与匹配错误
-
来源:纹理重复、模糊、光照变化、低对比度、水印/边框(WTF)等。
-
影响:错误对应→错误的两视几何→错误连接的 track → 假点 / 错误相机位姿。
-
缓解:用 RootSIFT / 学习型描述子、ratio test、交叉验证、检测并剔除 WTF 对(论文有专门讨论)。
-
-
几何验证与模型选择错误(单应/本质/基础矩阵判断)
-
来源:平面场景、纯旋转、视差太小导致模型混淆。
-
影响:错误标注为可用对,会导致退化三角化与位姿问题。
-
缓解:多模型验证(估计 F、H、E 并比较 inlier 比率),跳过全景/平面对作为初始化。
-
-
相机内参(自标定)误差
-
来源:初始焦距/畸变估计不准、主点不可辨识、过度自由化导致收敛到假解。
-
影响:系统性尺度/投影偏差,后续 BA 难收敛或发散。
-
缓解:对无先验的情况保持主点固定为图像中心、限制畸变范围、只在有足够观测时自标定。
-
-
三角化与几何条件差(baseline 小、三角角小)
-
来源:视角接近、两视基线短。
-
影响:深度不确定性大、点位置噪声呈大方差。
-
缓解:避免用纯旋转对三角化;设最小三角化角阈值;利用跨更大基线的传递匹配(transitive matches / track 扩展)。
-
-
外点 / track 合并错误(track 中混入多点)
-
来源:错误两视对应把不同点合并进一个 track。
-
影响:RANSAC/三角化失败或产生错点。
-
缓解:对 track 使用递归 RANSAC 分解(论文提出了 robust recursive triangulation),只接受满足 cheirality 和 reproj error 的子集合。
-
-
BA(Bundle Adjustment)问题:局部最优 / 漂移 / 计算量大
-
来源:初始解差、过多异常观测、模型参数过多。
-
影响:整体模型漂移、错误相机、长时间计算。
-
缓解:使用鲁棒损失(Cauchy),迭代 BA + re-triangulation + 过滤 的循环策略;对高冗余影像做分组参数化(grouped BA)以提速且减少过拟合。
-
-
传感器/物理误差:滚动快门、曝光差、同步不一致、图像噪声
-
影响:投影模型与真实不符,增加残差分布尾部。
-
缓解:必要时校正滚动快门或剔除不良帧;提高匹配阈值;在 BA 中采用更强鲁棒项。
-
常用诊断指标(应首先检查)
-
重投影误差的中位/均值(median/mean reproj error)。
-
Track 长度分布与 inlier ratio(短 track 与低 inlier ratio 表示大量错配)。
-
三角化角度直方图(大量 <2° 的点说明条件差)。
-
被过滤/剔除的相机数量与内参异常(说明自标定问题)。
-
模型连通性(scene graph 中孤立子图/断裂),以及重建覆盖率。
立刻可用的实践步骤(按优先级)
-
在匹配阶段:采用 RootSIFT + ratio test + NN-cross check;剔除边框/水印对(multi-model检测)。
-
几何验证:同时估计 H/F/E,按 NH/NF、NE/NF 决策模型类型,跳过全景对做初始化。
-
初始化:选择图中重连通、覆盖均匀的种子对(paper 的 next-best-view score)。
-
三角化:用递归 RANSAC 分解 track(recover multiple points),设最小三角角阈值并检查 cheirality。
-
优化循环:做 local BA → 过滤高残差观测 → re-triangulate → 再次 BA(通常两次迭代即可显著提升)。
-
BA 加速:对高度冗余的视图做 group parameterization(redundant view mining),减小 BA 规模同时保持精度。
关键公式(便于记笔记)
-
重投影误差(BA 优化目标):
-
三角化角(用于判断几何条件):
-
RANSAC 迭代上界(用于计算需要的采样次数):