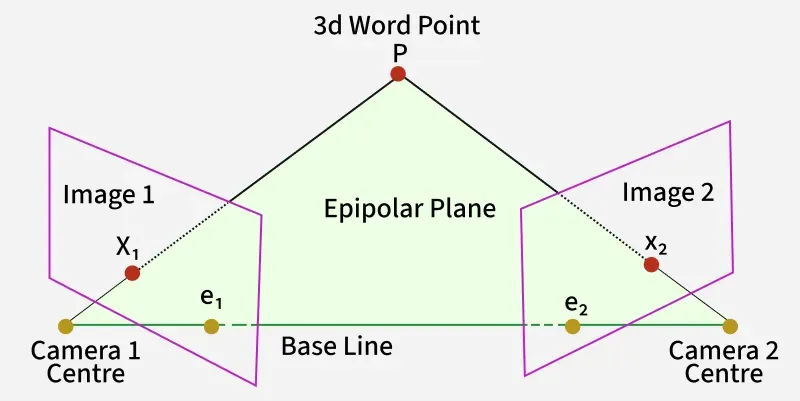
这张图展示的是对极几何(Epipolar Geometry),它是多视图几何和 SfM/MVS 里的核心概念。逐个元素解释如下:
图中元素
-
3D World Point P
三维空间中的某个点 ,被两个相机同时看到。 -
Camera 1 Centre / Camera 2 Centre
两个相机的光心(投影中心)。它们之间的连线叫做 基线 (Baseline)。 -
Image 1 / Image 2
两个相机的成像平面。-
是 在第一张图像上的投影点。
-
是 在第二张图像上的投影点。
-
-
Epipolar Plane
由 和两个相机中心构成的平面,叫做 对极平面。-
这个平面与两张图像平面的交线就是对极线 (Epipolar Line)。
-
图中虽然没画对极线,但可以想象: 在 Image 1 的投影 ,通过 会有一条对极线,它一定会穿过对应的对极点 。同理 对应一条过 的对极线。
-
-
Epipoles
相机2的光心在相机1图像平面的投影是 ;
相机1的光心在相机2图像平面的投影是 。
它们叫 对极点 (Epipole)。
核心关系
-
三维点 的投影 在第一张图像中。
它在第二张图像中的对应点 ,必须位于过 的那条对极线上。
这就是对极约束(epipolar constraint)。 -
数学上,这种约束写成:
x2TFx1=0x_2^T F x_1 = 0
其中 是基础矩阵 (Fundamental Matrix), 分别是齐次坐标形式的点。
直观理解
-
你有两台相机,看同一个3D点。
-
由于两相机和点 构成一个平面,所以投影到两张图像时,对应点必须落在对应的对极线上。
-
这大大减少了搜索匹配点的范围:从“整张图像”缩小到“一条直线”。
要不要我帮你把这张图用简单的 类比故事(比如“用两只眼睛看一支笔”)来解释?这样在做PPT汇报时会更直观。